This post will continue looking at the spatial frequency response measured by MTF Mapper off slanted edges in DPReview.com raw captures and relative fits by the ‘sharpness’ model discussed in the last few articles. The model takes the physical parameters of the digital camera and lens as inputs and produces theoretical directional system MTF curves comparable to measured data. As we will see the model seems to be able to simulate these systems well – at least within this limited set of parameters.
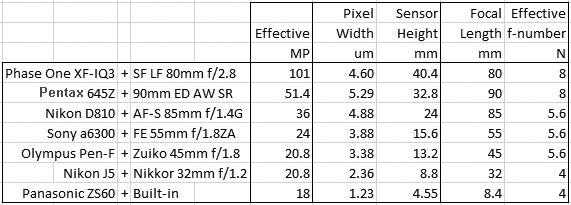
The following fits refer to the green channel of a number of interchangeable lens digital camera systems with different lenses, pixel sizes and formats – from the current Medium Format 100MP champ to the 1/2.3″ 18MP sensor size also sometimes found in the best smartphones. Here is the roster with the cameras as set up:
Having shown that our simple two dimensional MTF model is able to predict the performance of the combination of a perfect lens and square monochrome pixel with 100% Fill Factor we now turn to the effect of the sampling interval on spatial resolution according to the guiding formula:
(1)
The hats in this case mean the Fourier Transform of the relative component normalized to 1 at the origin (), that is the individual MTFs of the perfect lens PSF, the perfect square pixel and the delta grid; represents two dimensional convolution.
Sampling in the Spatial Domain
While exposed a pixel sees the scene through its aperture and accumulates energy as photons arrive. Below left is the representation of, say, the intensity that a star projects on the sensing plane, in this case resulting in an Airy pattern since we said that the lens is perfect. During exposure each pixel integrates (counts) the arriving photons, an operation that mathematically can be expressed as the convolution of the shown Airy pattern with a square, the size of effective pixel aperture, here assumed to have 100% Fill Factor. It is the convolution in the continuous spatial domain of lens PSF with pixel aperture PSF shown in Equation (2) of the first article in the series.
Sampling is then the product of an infinitesimally small Dirac delta function at the center of each pixel, the red dots below left, by the result of the convolution, producing the sampled image below right.
Figure 1. Left, 1a: A highly zoomed (3200%) image of the lens PSF, an Airy pattern, projected onto the imaging plane where the sensor sits. Pixels shown outlined in yellow. A red dot marks the sampling coordinates. Right, 1b: The sampled image zoomed at 16000%, 5x as much, because in this example each pixel’s width is 5 linear units on the side.
Now that we know from the introductory article that the spatial frequency response of a typical perfect digital camera and lens (its Modulation Transfer Function) can be modeled simply as the product of the Fourier Transform of the Point Spread Function of the lens and pixel aperture, convolved with a Dirac delta grid at cycles-per-pixel pitch spacing
We’ve seen how information about a photographic scene is collected in the ISOless/invariant range of a digital camera sensor, amplified, converted to digital data and stored in a raw file. For a given Exposure the best information quality (IQ) about the scene is available right at the photosites, only possibly degrading from there – but a properly designed** fully ISO invariant imaging system is able to store it in its entirety in the raw data. It is able to do so because the information carrying capacity (photographers would call it the dynamic range) of each subsequent stage is equal to or larger than the previous one. Cameras that are considered to be (almost) ISOless from base ISO include the Nikon D7000, D7200 and the Pentax K5. All digital cameras become ISO invariant above a certain ISO, the exact value determined by design compromises.
Figure 1: Simplified Scene Information Transfer in an ISO Invariant Imaging System at base ISO
In this article we’ll look at a class of imagers that are not able to store the whole information available at the photosites in one go in the raw file for a substantial portion of their working ISOs. The photographer can in such a case choose out of the full information available at the photosites what smaller subset of it to store in the raw data by the selection of different in-camera ISOs. Such cameras are sometimes improperly referred to as ISOful. Most Canon DSLRs fall into this category today. As do kings of darkness such as the Sony a7S or Nikon D5.
In the last few posts I have made the case that Image Quality in a digital camera is entirely dependent on the light Information collected at a sensor’s photosites during Exposure. Any subsequent processing – whether analog amplification and conversion to digital in-camera and/or further processing in-computer – effectively applies a set of Information Transfer Functions to the signal that when multiplied together result in the data from which the final photograph is produced. Each step of the way can at best maintain the original Information Quality (IQ) but in most cases it will degrade it somewhat.
IQ: Only as Good as at Photosites’ Output
This point is key: in a well designed imaging system** the final image IQ is only as good as the scene information collected at the sensor’s photosites, independently of how this information is stored in the working data along the processing chain, on its way to being transformed into a pleasing photograph. As long as scene information is properly encoded by the system early on, before being written to the raw file – and information transfer is maintained in the data throughout the imaging and processing chain – final photograph IQ will be virtually the same independently of how its data’s histogram looks along the way.
We know that the best Information Quality possible collected from the scene by a digital camera is available right at the output of the sensor and it will only be degraded from there. This article will discuss what happens to this information as it is transferred through the imaging system and stored in the raw data. It will use the simple language outlined in the last post to explain how and why the strategy for Capturing the best Information or Image Quality (IQ) possible from the scene in the raw data involves only two simple steps:
1) Maximizing the collected Signal given artistic and technical constraints; and
2) Choosing what part of the Signal to store in the raw data and what part to leave behind.
The second step is only necessary if your camera is incapable of storing the entire Signal at once (that is it is not ISO invariant) and will be discussed in a future article. In this post we will assume an ISOless imaging system.
Most of the photographs captured these days end up being viewed on a display of some sort, with at best 4K (4096×2160) but often no better than HD resolution (1920×1080). Since the cameras that capture them have typically several times that number of pixels, 6000×4000 being fairly normal today, most images need to be substantially downsized for viewing, even allowing for some cropping. Resizing algorithms built into browsers or generic image viewers tend to favor expediency over quality, so it behooves the IQ conscious photographer to manage the process, choosing the best image size and downsampling algorithm for the intended file and display medium.
When downsizing the objective is to maximize the original spatial resolution retained while minimizing the possibility of aliasing and moirè. In this article we will take a closer look at some common downsizing algorithms and their effect on spatial resolution information in the frequency domain.
There are several ways to extract Sensor IQ metrics like read noise, Full Well Count, PRNU, Dynamic Range and others from mean and standard deviation statistics obtained from a uniform patch in a camera’s raw file. In the last post we saw how to do it by using such parameters to make observed data match the measured SNR curve. In this one we will achieve the same objective by fitting mean and standard deviation data. Since the measured data is identical, if the fit is good so should be the results.
Sensor Metrics from Measured Mean and Standard Deviation in DN
Imperfections in an imaging system’s capture process manifest themselves in the form of deviations from the expected signal. We call these imperfections ‘noise’ because they introduce grain and artifacts in our images. The fewer the imperfections, the lower the noise, the higher the image quality.
However, because the Human Visual System is adaptive within its working range, it’s not the absolute amount of noise that matters to perceived Image Quality (IQ) as much as the amount of noise relative to the signal – represented for instance by the Signal to Noise Ratio (SNR). That’s why to characterize the performance of a sensor in addition to signal and noise we also need to determine its sensitivity and the maximum signal it can detect.
In this series of articles I will describe how to use the Photon Transfer method and a spreadsheet to determine basic IQ performance metrics of a digital camera sensor. It is pretty easy if we keep in mind the simple model of how light information is converted into raw data by digital cameras:
Olympus just announced the E-M5 Mark II, an updated version of its popular micro Four Thirds E-M5 model, with an interesting new feature: its 16MegaPixel sensor, presumably similar to the one in other E-Mx bodies, has a high resolution mode where it gets shifted around by the image stabilization servos during exposure to capture, as they say in their press release
‘resolution that goes beyond full-frame DSLR cameras. 8 images are captured with 16-megapixel image information while moving the sensor by 0.5 pixel steps between each shot. The data from the 8 shots are then combined to produce a single, super-high resolution image, equivalent to the one captured with a 40-megapixel image sensor.’
A great idea that could give a welcome boost to the ‘sharpness’ of this handy system. Preliminary tests show that the E-M5 mk II 64MP High-Res mode gives some advantage in MTF50 linear spatial resolution compared to the Standard Shot 16MP mode with the captures in this post. Plus it apparently virtually eliminates the possibility of aliasing and moiré. Great stuff, Olympus.
So, is it true that a Four Thirds lens needs to be about twice as ‘sharp’ as its Full Frame counterpart in order to be able to display an image of spatial resolution equivalent to the larger format’s?
It is, because of the simple geometry I will describe in this article. In fact with a few provisos one can generalize and say that lenses from any smaller format need to be ‘sharper’ by the ratio of their sensor diagonals in order to produce the same linear resolution on same-sized final images.
This is one of the reasons why Ansel Adams shot 4×5 and 8×10 – and I would too, were it not for logistical and pecuniary concerns.
Determining the Signal to Noise Ratio (SNR) curves of your digital camera at various ISOs and extracting from them the underlying IQ metrics of its sensor can help answer a number of questions useful to photography. For instance whether/when to raise ISO; what its dynamic range is; how noisy its output could be in various conditions; or how well it is likely to perform compared to other Digital Still Cameras. As it turns out obtaining the relative data is a little time consuming but not that hard. All you need is your camera, a suitable target, a neutral density filter, dcraw or libraw or similar software to access the linear raw data – and a spreadsheet.
In photography the higher the ratio of Signal to Noise, the less grainy the final image normally looks. The Signal-to-Noise-ratio SNR is therefore a key component of Image Quality. Let’s take a closer look at it. Continue reading SNR Curves and IQ in Digital Cameras→
Effective Quantum Efficiency as I calculate it is an estimate of the probability that a visible photon – from a ‘Daylight’ blackbody radiating source at a temperature of 5300K impinging on the sensor in question after making it through its IR filter, UV filter, AA low pass filter, microlenses, average Color Filter – will produce a photoelectron upon hitting silicon:
One of the fairest ways to compare the performance of two cameras of different physical characteristics and specifications is to ask a simple question: which photograph would look better if the cameras were set up side by side, captured identical scene content and their output were then displayed and viewed at the same size?
Achieving this set up and answering the question is anything but intuitive because many of the variables involved, like depth of field and sensor size, are not those we are used to dealing with when taking photographs. In this post I would like to attack this problem by first estimating the output signal of different cameras when set up to capture Equivalent images.
It’s a bit long so I will give you the punch line first: digital cameras of the same generation set up equivalently will typically generate more or less the same signal in independently of format. Ignoring noise, lenses and aspect ratio for a moment and assuming the same camera gain and number of pixels, they will produce identical raw files. Continue reading Equivalence and Equivalent Image Quality: Signal→
Why Raw? The question is whether one is interested in measuring the objective, quantitative spatial resolution capabilities of the hardware or whether instead one would prefer to measure the arbitrary, qualitatively perceived sharpening prowess of (in-camera or in-computer) processing software as it turns the capture into a pleasing final image. Either is of course fine.
My take on this is that the better the IQ captured the better the final image will be after post processing. In other words I am typically more interested in measuring the spatial resolution information produced by the hardware comfortable in the knowledge that if I’ve got good quality data to start with its appearance will only be improved in post by the judicious use of software. By IQ here I mean objective, reproducible, measurable physical quantities representing the quality of the information captured by the hardware, ideally in scientific units.
You want to measure how sharp your camera/lens combination is to make sure it lives up to its specs. Or perhaps you’d like to compare how well one lens captures spatial resolution compared to another you own. Or perhaps again you are in the market for new equipment and would like to know what could be expected from the shortlist. Or an old faithful is not looking right and you’d like to check it out. So you decide to do some testing. Where to start?
In the next four articles I will walk you through my methodology based on captures of slanted edge targets:
Is MTF50 a good proxy for perceived sharpness? In this article and those that follow MTF50 indicates the spatial frequency at which the Modulation Transfer Function of an imaging system is half (50%) of what it would be if the system did not degrade detail in the image painted by incoming light.
It makes intuitive sense that the spatial frequencies that are most closely related to our perception of sharpness vary with the size and viewing distance of the displayed image.
For instance if an image captured by a Full Frame camera is viewed at ‘standard’ distance (that is a distance equal to its diagonal), it turns out that the portion of the MTF curve most representative of perceived sharpness appears to be around MTF90. On the other hand, when pixel peeping, the spatial frequencies around MTF50 look to be a decent, simple to calculate indicator of it with a current imaging system in good working conditions. Continue reading MTF50 and Perceived Sharpness→
The in-camera ISO dial is a ballpark milkshake of an indicator to help choose parameters that will result in a ‘good’ perceived picture. Key ingredients to obtain a ‘good’ perceived picture are 1) ‘good’ Exposure and 2) ‘good’ in-camera or in-computer processing. It’s easier to think about them as independent processes and that comes naturally to you because you shoot raw in manual mode and you like to PP, right? Continue reading Exposure and ISO→

 ), that is the individual MTFs of the perfect lens PSF, the perfect square pixel and the delta grid;
), that is the individual MTFs of the perfect lens PSF, the perfect square pixel and the delta grid;  represents two dimensional convolution.
represents two dimensional convolution.

 here indicating normalization to one at the origin). I used Matlab to generate the examples below but you can easily do the same with a spreadsheet.
here indicating normalization to one at the origin). I used Matlab to generate the examples below but you can easily do the same with a spreadsheet. 



 the signal in photoelectrons and
the signal in photoelectrons and  the
the  independently of format. Ignoring noise, lenses and aspect ratio for a moment and assuming the same camera gain and number of pixels, they will produce identical raw files.
independently of format. Ignoring noise, lenses and aspect ratio for a moment and assuming the same camera gain and number of pixels, they will produce identical raw files.