Equivalence – as we’ve discussed one of the fairest ways to compare the performance of two cameras of different physical formats, characteristics and specifications – essentially boils down to two simple realizations for digital photographers:
- metrics need to be expressed in units of picture height (or diagonal where the aspect ratio is significantly different) in order to easily compare performance with images displayed at the same size; and
- focal length changes proportionally to sensor size in order to capture identical scene content on a given sensor, all other things being equal.
The first realization should be intuitive (see next post). The second one is the subject of this post: I will deal with it through a couple of geometrical diagrams.
Equivalence asks a simple question: which final photograph would look better if two cameras were set up in the same spot, captured identical scene content and their output were then displayed and viewed at the same size?
Recall that final displayed images are considered to be Equivalent for the purpose of this series if and only if :
- The are made up of the same number of pixels
- They measure the same length diagonally (same display size)
- They are viewed from the same distance by a person with the same visual acuity (same Circle of Confusion on display)
- They represent exactly the same scene (same lighting, subject and field of view)
- The perspective in the captured scene is the same (same taking position and distance to subject)
- They are subject to the same motion blur constraints (same exposure time)
- All other things being equal/equivalent, including shutter shock, camera shake, electronics etc.
To make things simpler, let’s assume that we have a single camera with a thin lens fixed in space. The camera has the ability to mount sensors of different formats to its sensing plane and to move it backwards and forwards with respect to the lens to adjust focal length. The lens’ aperture is constant.
We set up our camera with the movable back to capture a single tree at the center of a distant scene. We position the non-movable lens a fixed distance U from the scene ensuring that the tree fills the field of view when the camera back is in the Full Frame focal length position. Scene to the left of the lens, camera+sensor to the right:
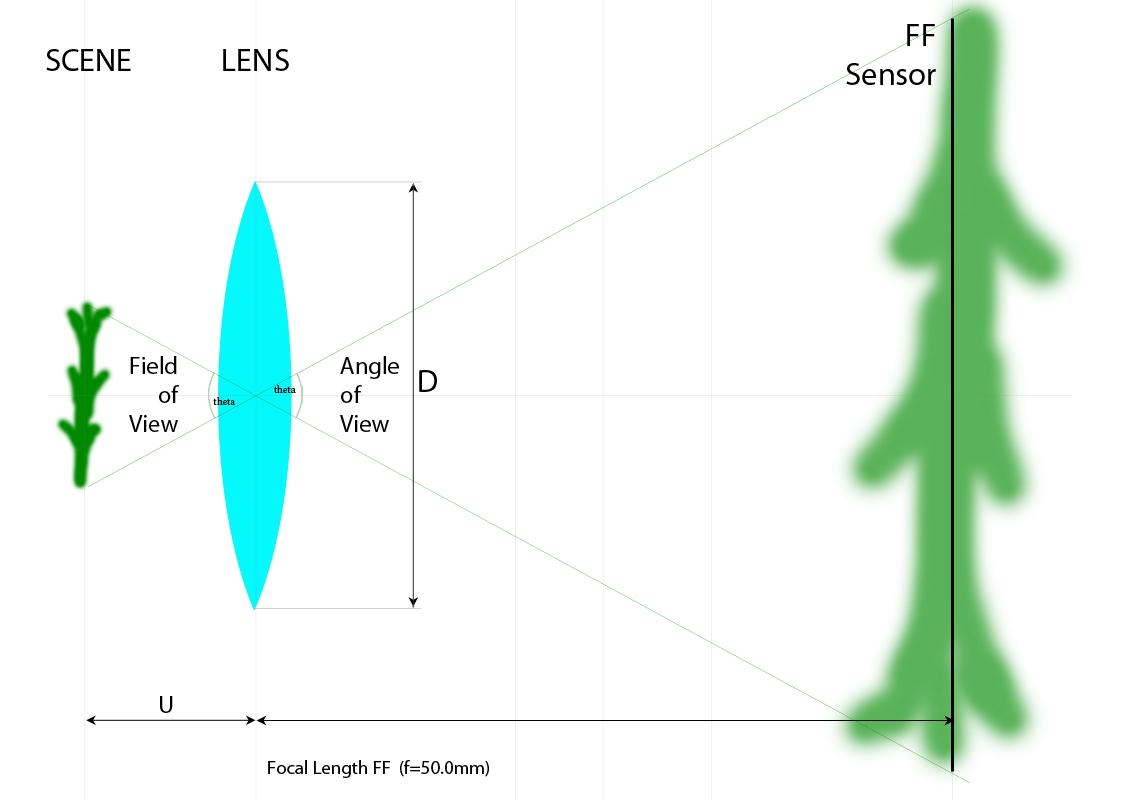
This somewhat simplified – but for the purposes of field of view accurate – diagram shows the tree barely fitting within the field of view of our FF sensor, as desired. In the field we call it a ‘field of view’ or FOV but speaking in geometrical terms it is really an angle of view, AOV. The angle of view is obviously the same on both the sensor and scene side of the diagram and it is determined solely by the size of the subject and its distance from the center of the thin lens.
If we replaced the FF sensor with one of a different size and we wanted the tree to just fit within it as in the case above in order to fulfil the requirement for equal Field of View for Equivalence – all we would need to do is move the back of our flexible camera backward or forward so that the sensor in question just fit within the lines defined by the AOV, as shown below

When moving the back forward all we are doing is creating similar isosceles triangles with a smaller base. We know that if the base (sensor) of one triangle is half the size of a second similar one, the height (its distance to the lens) of the first triangle will also be half of the second one. Half the sensor height means half the distance to the lens (approximately the focal length for our purposes) if field of view is to be maintained. Base 1 is to base 2 as height 1 is to height 2, or in our case for example:
![\[ \frac{SensorHeight_{FF}}{SensorHeight_{mFT}}=\frac{f_{FF}}{f_{mFT}} \]](https://i0.wp.com/www.strollswithmydog.com/wordpress/wp-content/ql-cache/quicklatex.com-714ec2c27725224595ff0f1ac16d60fb_l3.png?resize=216%2C40&ssl=1 "Rendered by QuickLaTeX.com")
We are taking a couple of shortcuts but this in essence suggests that all other things being equal/equivalent two differently sized sensors will see identical scene content as long as the ratio of their focal lengths is equal to the ratio of their size. In other words, half the height (or better, diagonal), half the focal length.
Equivalent Focal Length: Proportional to Sensor Size
Using the diagonal of the sensor instead of its height for the calculations in order to mitigate aspect ratio issues, one therefore gets the focal lengths that would produce an Equivalent diagonal field of view for different format sizes all else staying equal:

That’s why to maintain Equivalent scene content the focal length in different formats needs to be adjusted proportionately to sensor height (or diagonal): half the format size, half the Equivalent focal length. No magic, just geometry.
Once one realizes that to obtain the same field of view, focal length needs to be proportional to sensor size all else equal, all other parameters used in photography that depend on focal length fall into Equivalent line.
Equivalent f-number: Proportional to Sensor Size
f-number ( ) in photographic applications is usuallyapproximated by the ratio of focal length (
) in photographic applications is usuallyapproximated by the ratio of focal length ( ) to effective lens aperture (
) to effective lens aperture ( )
)

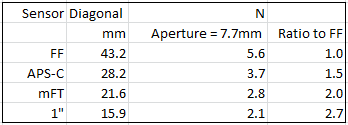
In our movable back camera example the lens has the same aperture for all sensors (refer to diagram 2 above). It follows that with a constant if changes so does , proportionately.
So when maintaining an Equivalent field of view all other things being equal the f-number varies proportionately to sensor diagonal: half the format size, half the Equivalent f-number. For example with an effective aperture equal to 7.7mm:
Equivalent Diffraction: Proportional to Sensor Size
The same applies to diffraction, which spreads out a beam of light passing through a circular aperture into an (Airy) disk whose first zero has an approximate diameter of

in the same units as lambda. With  on average around 0.55 microns this is how much the light beam would be spread out at the various format’s focal lengths (sensor locations, for our flexible camera)
on average around 0.55 microns this is how much the light beam would be spread out at the various format’s focal lengths (sensor locations, for our flexible camera)
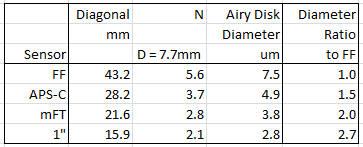
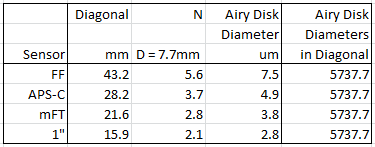
Wait, you say. You mean that in an Equivalent setup the Airy disk is half the size on a mFT sensor than on FF? Of course but recall that what counts when viewed at an equal display size is its size in units of picture (or sensor) diagonals, as explained in the next article. If we compute the number of Airy disks in the diagonal of the displayed image of each format we realize that diffraction affects equally all formats set up Equivalently when viewed at the same size and distance.
Equivalent Depth of Field: Neutral wrt Sensor Size
Depth of Field is the distance between the closest and farthest objects in a photo that appear acceptably sharp. It is useful to control attributes like spaciousness or separation in photography. With many assumptions the DOF produced in the typical landscape foreground by a perfect lens of circular aperture can be approximated by the following geometric formula:
![\[ DOF = \frac{2CU^2}{fD} \]](https://i0.wp.com/www.strollswithmydog.com/wordpress/wp-content/ql-cache/quicklatex.com-ead7ef33f027888ae62bd41e1e505ac9_l3.png?resize=114%2C43&ssl=1 "Rendered by QuickLaTeX.com")
with
 the circle of confusion on the sensing plane
the circle of confusion on the sensing plane the distance to the subject in the scene
the distance to the subject in the scene- the focal length of the lens
- the circular aperture diameter
 all in the same units (say mm). With an Equivalent setup distance to subject and aperture diameter are supposed to be equal so they are irrelevant to a comparison between formats. The circle of confusion as viewed on the displayed image is also one and the same by definition. When projected onto the sensor, however, the circle of confusion in the numerator will be proportional to sensor size as a result of the different magnification required by the two formats being compared therefore canceling the effect of Equivalent focal length in the denominator. This turns out to be also true if we use the full, non-simplified geometric formula for DOF. Therefore with these assumptions Depth of Field is seen to be the same in Equivalent captures.
all in the same units (say mm). With an Equivalent setup distance to subject and aperture diameter are supposed to be equal so they are irrelevant to a comparison between formats. The circle of confusion as viewed on the displayed image is also one and the same by definition. When projected onto the sensor, however, the circle of confusion in the numerator will be proportional to sensor size as a result of the different magnification required by the two formats being compared therefore canceling the effect of Equivalent focal length in the denominator. This turns out to be also true if we use the full, non-simplified geometric formula for DOF. Therefore with these assumptions Depth of Field is seen to be the same in Equivalent captures.
All Else Being Equal
In digital photography ‘all else equal’ may include pixel pitch and effective pixel aperture. These parameters may not be the same when performing an Equivalent comparison – which assumes the same number of pixels in images under consideration – affecting how well the CoC is sampled and consequently perceived sharpness and DOF. We will leave dissecting their impact on DOF for another time.
The direct relationship with focal length also breaks down with more complex parameters, as for instance shown earlier in the case of focus tolerance.
Let’s next take a pictorial look at Equivalence and ‘sharpness’.