In this article we confirm quantitatively that getting the White Point, hence the White Balance, right is essential to obtaining natural tones out of our captures. How quickly do colors degrade if the estimated Correlated Color Temperature is off?

In this article we confirm quantitatively that getting the White Point, hence the White Balance, right is essential to obtaining natural tones out of our captures. How quickly do colors degrade if the estimated Correlated Color Temperature is off?
In this article I bring together qualitatively the main concepts discussed in the series and argue that in many (most) cases a photographer’s job in order to obtain natural looking tones in their work during raw conversion is to get the illuminant and relative white balance right – and to step away from any slider found in menus with the word ‘color’ in them.

If you are an outdoor photographer trying to get balanced greens under an overcast sky – or a portrait photographer after good skin tones – dialing in the appropriate scene, illuminant and white balance puts the camera/converter manufacturer’s color science to work and gets you most of the way there safely. Of course the judicious photographer always knew to do that – hopefully now with a better appreciation as for why.
As we have seen in the previous post, knowing the characteristics of light at the scene is critical to be able to determine the color transform that will allow captured raw data to be naturally displayed from an output color space like ubiquitous sRGB.
The light source Spectral Power Distribution (SPD) corresponds to a unique White Point, namely a set of coordinates in the  color space, obtained by multiplying wavelength-by-wavelength its SPD (the blue curve below) by the Color Matching Functions of a Standard Observer (
color space, obtained by multiplying wavelength-by-wavelength its SPD (the blue curve below) by the Color Matching Functions of a Standard Observer ( )
)

Adding (integrating) the three resulting curves up we get three values that represent the illuminant’s coordinates in the color space. The White Point is then obtained by dividing these coordinates by the  value to normalize it to 1.
value to normalize it to 1.
The White Point is then seen to be independent of the intensity of the arriving light, as represents Luminance from the scene. For instance a Standard Daylight Illuminant with a Correlated Color Temperature of 5300k has a White Point of[1]
 = [0.9593 1.0000 0.8833] Continue reading White Point, CCT and Tint
= [0.9593 1.0000 0.8833] Continue reading White Point, CCT and Tint
Building on a preceeding article of this series, once demosaiced raw data from a Bayer Color Filter Array sensor represents the captured image as a set of triplets, corresponding to the estimated light intensity at a given pixel under each of the three spectral filters part of the CFA. The filters are band-pass and named for the representative peak wavelength that they let through, typically red, green, blue or  ,
,  ,
,  for short.
for short.
Since the resulting intensities are linearly independent they can form the basis of a 3D coordinate system, with each  triplet representing a point within it. The system is bounded in the raw data by the extent of the Analog to Digital Converter, with all three channels spanning the same range, from Black Level with no light to clipping with maximum recordable light. Therefore it can be thought to represent a space in the form of a cube – or better, a parallelepiped – with the origin at [0,0,0] and the opposite vertex at the clipping value in Data Numbers, expressed as [1,1,1] if we normalize all data by it.
triplet representing a point within it. The system is bounded in the raw data by the extent of the Analog to Digital Converter, with all three channels spanning the same range, from Black Level with no light to clipping with maximum recordable light. Therefore it can be thought to represent a space in the form of a cube – or better, a parallelepiped – with the origin at [0,0,0] and the opposite vertex at the clipping value in Data Numbers, expressed as [1,1,1] if we normalize all data by it.

The job of the color transform is to project demosaiced raw data to a standard output  color space designed for viewing. Such spaces have names like
color space designed for viewing. Such spaces have names like  ,
,  or
or  . The output space can also be shown in 3D as a parallelepiped with the origin at [0,0,0] with no light and the opposite vertex at [1,1,1] with maximum displayable light. Continue reading Linear Color Transforms
. The output space can also be shown in 3D as a parallelepiped with the origin at [0,0,0] with no light and the opposite vertex at [1,1,1] with maximum displayable light. Continue reading Linear Color Transforms
In the previous article we determined that the three  values recorded in the raw data in the center of the image plane in units of Data Numbers per pixel – by a digital camera and lens as a function of absolute spectral radiance
values recorded in the raw data in the center of the image plane in units of Data Numbers per pixel – by a digital camera and lens as a function of absolute spectral radiance  at the lens – can be estimated as follows:
at the lens – can be estimated as follows:
(1) 
with subscript  indicating absolute-referred units and
indicating absolute-referred units and  the three system Spectral Sensitivity Functions. In this series of articles
the three system Spectral Sensitivity Functions. In this series of articles  is wavelength by wavelength multiplication (what happens to the spectrum of light as it progresses through the imaging system) and the integral just means the area under each of the three resulting curves (integration is what the pixels do during exposure). Together they represent an inner or dot product. All variables in front of the integral were previously described and can be considered constant for a given photographic setup. Continue reading Connecting Photographic Raw Data to Tristimulus Color Science
is wavelength by wavelength multiplication (what happens to the spectrum of light as it progresses through the imaging system) and the integral just means the area under each of the three resulting curves (integration is what the pixels do during exposure). Together they represent an inner or dot product. All variables in front of the integral were previously described and can be considered constant for a given photographic setup. Continue reading Connecting Photographic Raw Data to Tristimulus Color Science
In the previous article we (I) learned that the Spectral Sensitivity Functions of a given digital camera and lens are the result of the interaction of light from the scene with all of the spectrally varied components that make up the imaging system: mainly the lens, ultraviolet/infrared hot mirror, Color Filter Array and other filters, finally the photoelectric layer of the sensor, which is normally silicon in consumer kit.

In this one we will put the process on a more formal theoretical footing, setting the stage for the next few on the role of white balance.
Photography works because visible light from one or more sources reaches the scene and is reflected in the direction of the camera, which then captures a signal proportional to it. The journey of light can be described in integrated units of power all the way to the sensor, for instance so many watts per square meter. However ever since Newton we have known that such total power is in fact the result of the weighted sum of contributions by every frequency that makes up the light, what he called its spectrum.
Our ability to see and record color depends on knowing the distribution of the power contained within a subset of these frequencies and how it interacts with the various objects in its path. This article is about how a typical digital camera for photographers interacts with such a spectrum from the scene: we will dissect what is sometimes referred to as the system’s Spectral Response or Sensitivity.

Now that we know how to open 12-bit raw files captured with the new Raspberry Pi High Quality Camera, we can learn a bit more about the capabilities of its 1/2.3″ Sony IMX477 sensor from a keen photographer’s perspective. The subject is a bit dry, so I will give you the summary upfront. These figures were obtained with my HQ module at room temperature and the raspistill – -raw (-r) command:
| Raspberry Pi HQ Camera | raspistill --raw -ag 1 | Comments |
|---|---|---|
| Black Level | 256.3 DN | 256.0 - 257.3 based on gain |
| White Level | 4095 | Constant throughout |
| Analog Gain | 1 | Gain Range 1 - 16 |
| Read Noise | 3 e-, gain 1 1.5 e-, gain 16 | 1.53 DN from black frame 11.50 DN |
| Clipping (FWC) | 8180 e- | at base gain, 3400e-/um^2 |
| Dynamic Range | 11.15 stops 11.3 stops | SNR = 1 to Clipping Read Noise to Clipping |
| System Gain | 0.47 DN/e- | at base analog gain |
| Star Eater Algorithm | Partly Defeatable | All channels - from base gain and from min shutter speed |
| Low Pass Filter | Yes | All channels - from base gain and from min shutter speed |
Now that we know how to create a 3×3 linear matrix to convert white balanced and demosaiced raw data into  connection space – and where to obtain the 3×3 linear matrix to then convert it to a standard output color space like sRGB – we can take a closer look at the matrices and apply them to a real world capture chosen for its wide range of chromaticities.
connection space – and where to obtain the 3×3 linear matrix to then convert it to a standard output color space like sRGB – we can take a closer look at the matrices and apply them to a real world capture chosen for its wide range of chromaticities.

We understand from the previous article that rendering color with Adobe DNG raw conversion essentially means mapping raw data in the form of triplets into a standard color space via a Profile Connection Space in a two step process
![\[ Raw Data \rightarrow XYZ_{D50} \rightarrow RGB_{standard} \]](https://i0.wp.com/www.strollswithmydog.com/wordpress/wp-content/ql-cache/quicklatex.com-062c1798a46be7f6f42a79b450d40bde_l3.png?resize=298%2C15&ssl=1 "Rendered by QuickLaTeX.com")
The first step white balances and demosaics the raw data, which at that stage we will refer to as , followed by converting it to Profile Connection Space through linear projection by an unknown ‘Forward Matrix’ (as DNG calls it) of the form
(1) ![\begin{equation*} \left[ \begin{array}{c} X_{D50} \\ Y_{D50} \\ Z_{D50} \end{array} \right] = \begin{bmatrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \end{bmatrix} \left[ \begin{array}{c} r \\ g \\ b \end{array} \right] \end{equation*}](https://i0.wp.com/www.strollswithmydog.com/wordpress/wp-content/ql-cache/quicklatex.com-b9f4277814179e1fbcf64e1a69a53818_l3.png?resize=273%2C64&ssl=1 "Rendered by QuickLaTeX.com")
with data as column-vectors in a 3xN array. Determining the nine  coefficients of this matrix
coefficients of this matrix  is the main subject of this article[1]. Continue reading Color: Determining a Forward Matrix for Your Camera
is the main subject of this article[1]. Continue reading Color: Determining a Forward Matrix for Your Camera
How do we translate captured image information into a stimulus that will produce the appropriate perception of color? It’s actually not that complicated[1].
Recall from the introductory article that a photon absorbed by a cone type ( ,
,  or
or  ) in the fovea produces the same stimulus to the brain regardless of its wavelength[2]. Take the example of the eye of an observer which focuses on the retina the image of a uniform object with a spectral photon distribution of 1000 photons/nm in the 400 to 720nm wavelength range and no photons outside of it.
) in the fovea produces the same stimulus to the brain regardless of its wavelength[2]. Take the example of the eye of an observer which focuses on the retina the image of a uniform object with a spectral photon distribution of 1000 photons/nm in the 400 to 720nm wavelength range and no photons outside of it.
Because the system is linear, cones in the foveola will weigh the incoming photons by their relative sensitivity (probability) functions and add the result up to produce a stimulus proportional to the area under the curves. For instance a cone may see about 321,000 photons arrive and produce a relative stimulus of about 94,700, the weighted area under the curve:

This article will set the stage for a discussion on how pleasing color is produced during raw conversion. The easiest way to understand how a camera captures and processes ‘color’ is to start with an example of how the human visual system does it.
Light from the sun strikes leaves on a tree. The foliage of the tree absorbs some of the light and reflects the rest diffusely towards the eye of a human observer. The eye focuses the image of the foliage onto the retina at its back. Near the center of the retina there is a small circular area called fovea centralis which is dense with light receptors of well defined spectral sensitivities called cones. Information from the cones is pre-processed by neurons and carried by nerve fibers via the optic nerve to the brain where, after some additional psychovisual processing, we recognize the color of the foliage as green[1].

Continue reading An Introduction to Color in Digital Cameras
What are the basic low level steps involved in raw file conversion? In this article I will discuss what happens under the hood of digital camera raw converters in order to turn raw file data into a viewable image, a process sometimes referred to as ‘rendering’. We will use the following raw capture by a Nikon D610 to show how image information is transformed at every step along the way:

This post will continue looking at the spatial frequency response measured by MTF Mapper off slanted edges in DPReview.com raw captures and relative fits by the ‘sharpness’ model discussed in the last few articles. The model takes the physical parameters of the digital camera and lens as inputs and produces theoretical directional system MTF curves comparable to measured data. As we will see the model seems to be able to simulate these systems well – at least within this limited set of parameters.
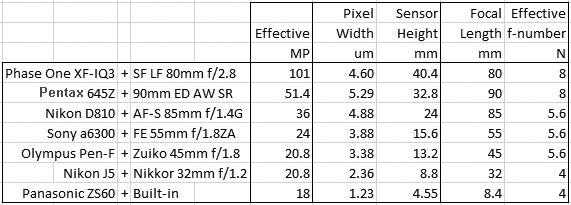
The following fits refer to the green channel of a number of interchangeable lens digital camera systems with different lenses, pixel sizes and formats – from the current Medium Format 100MP champ to the 1/2.3″ 18MP sensor size also sometimes found in the best smartphones. Here is the roster with the cameras as set up:
The series of articles starting here outlines a model of how the various physical components of a digital camera and lens can affect the ‘sharpness’ – that is the spatial resolution – of the images captured in the raw data. In this one we will pit the model against MTF curves obtained through the slanted edge method[1] from real world raw captures both with and without an anti-aliasing filter.
With a few simplifying assumptions, which include ignoring aliasing and phase, the spatial frequency response (SFR or MTF) of a photographic digital imaging system near the center can be expressed as the product of the Modulation Transfer Function of each component in it. For a current digital camera these would typically be the main ones:
(1) 
all in two dimensions Continue reading Taking the Sharpness Model for a Spin
We now know how to calculate the two dimensional Modulation Transfer Function of a perfect lens affected by diffraction, defocus and third order Spherical Aberration – under monochromatic light at the given wavelength and f-number. In digital photography however we almost never deal with light of a single wavelength. So what effect does an illuminant with a wide spectral power distribution, going through the color filter of a typical digital camera CFA before the sensor have on the spatial frequency responses discussed thus far?
Not much, it turns out. Continue reading A Simple Model for Sharpness in Digital Cameras – Polychromatic Light
Spherical Aberration (SA) is one key component missing from our MTF toolkit for modeling an ideal imaging system’s ‘sharpness’ in the center of the field of view in the frequency domain. In this article formulas will be presented to compute the two dimensional Point Spread and Modulation Transfer Functions of the combination of diffraction, defocus and third order Spherical Aberration for an otherwise perfect lens with a circular aperture.
Spherical Aberrations result because most photographic lenses are designed with quasi spherical surfaces that do not necessarily behave ideally in all situations. For instance, they may focus light on systematically different planes depending on whether the respective ray goes through the exit pupil closer or farther from the optical axis, as shown below:

Continue reading A Simple Model for Sharpness in Digital Cameras – Spherical Aberrations
This series of articles has dealt with modeling an ideal imaging system’s ‘sharpness’ in the frequency domain. We looked at the effects of the hardware on spatial resolution: diffraction, sampling interval, sampling aperture (e.g. a squarish pixel), anti-aliasing OLPAF filters. The next two posts will deal with modeling typical simple imperfections related to the lens: defocus and spherical aberrations.
Defocus means that the sensing plane is not exactly where it needs to be for image formation in our ideal imaging system: the image is therefore out of focus (OOF). Said another way, light from a point source would go through the lens but converge either behind or in front of the sensing plane, as shown in the following diagram, for a lens with a circular aperture:

Continue reading A Simple Model for Sharpness in Digital Cameras – Defocus
This article will discuss a simple frequency domain model for an AntiAliasing (or Optical Low Pass) Filter, a hardware component sometimes found in a digital imaging system[1]. The filter typically sits just above the sensor and its objective is to block as much of the aliasing and moiré creating energy above the monochrome Nyquist spatial frequency while letting through as much as possible of the real image forming energy below that, hence the low-pass designation.

In consumer digital cameras it is often implemented by introducing one or two birefringent plates in the sensor’s filter stack. This is how Nikon shows it for one of its DSLRs:

Continue reading A Simple Model for Sharpness in Digital Cameras – AA
Having shown that our simple two dimensional MTF model is able to predict the performance of the combination of a perfect lens and square monochrome pixel with 100% Fill Factor we now turn to the effect of the sampling interval on spatial resolution according to the guiding formula:
(1) 
The hats in this case mean the Fourier Transform of the relative component normalized to 1 at the origin ( ), that is the individual MTFs of the perfect lens PSF, the perfect square pixel and the delta grid;
), that is the individual MTFs of the perfect lens PSF, the perfect square pixel and the delta grid;  represents two dimensional convolution.
represents two dimensional convolution.
While exposed a pixel sees the scene through its aperture and accumulates energy as photons arrive. Below left is the representation of, say, the intensity that a star projects on the sensing plane, in this case resulting in an Airy pattern since we said that the lens is perfect. During exposure each pixel integrates (counts) the arriving photons, an operation that mathematically can be expressed as the convolution of the shown Airy pattern with a square, the size of effective pixel aperture, here assumed to have 100% Fill Factor. It is the convolution in the continuous spatial domain of lens PSF with pixel aperture PSF shown in Equation (2) of the first article in the series.
Sampling is then the product of an infinitesimally small Dirac delta function at the center of each pixel, the red dots below left, by the result of the convolution, producing the sampled image below right.

Continue reading A Simple Model for Sharpness in Digital Cameras – Sampling & Aliasing
Now that we know from the introductory article that the spatial frequency response of a typical perfect digital camera and lens (its Modulation Transfer Function) can be modeled simply as the product of the Fourier Transform of the Point Spread Function of the lens and pixel aperture, convolved with a Dirac delta grid at cycles-per-pixel pitch spacing
(1) 
we can take a closer look at each of those components ( here indicating normalization to one at the origin). I used Matlab to generate the examples below but you can easily do the same with a spreadsheet. Continue reading A Simple Model for Sharpness in Digital Cameras – Diffraction and Pixel Aperture
here indicating normalization to one at the origin). I used Matlab to generate the examples below but you can easily do the same with a spreadsheet. Continue reading A Simple Model for Sharpness in Digital Cameras – Diffraction and Pixel Aperture
In this and the previous article I present my thoughts on how MTF50 results obtained from raw data of the four Bayer CFA channels – off a uniformly illuminated neutral target captured with a typical digital camera through the slanted edge method – can be combined to provide a meaningful composite MTF50 for the imaging system as a whole1. Corrections, suggestions and challenges are welcome. Continue reading COMBINING BAYER CFA MTF Curves – II
For the purposes of ‘sharpness’ spatial resolution measurement in photography cameras can be considered shift-invariant, linear systems.
Shift invariant means that the imaging system should respond exactly the same way no matter where light from the scene falls on the sensing medium . We know that in a strict sense this is not true because for instance a pixel has a square area so it cannot have an isotropic response by definition. However when using the slanted edge method of linear spatial resolution measurement we can effectively make it shift invariant by careful preparation of the testing setup. For example the edges should be slanted no more than this and no less than that. Continue reading Linearity in the Frequency Domain
This article is a little esoteric so one may want to skip it unless one is interested in the underlying mechanisms that cause quantization error as photographic signal and noise approach the darkest levels of acceptable dynamic range in our digital cameras: one least significant bit in the raw data. We will use our simplified camera model and deal with Poissonian Signal and Gaussian Read Noise separately – then attempt to bring them together.
Physicists and mathematicians over the last few centuries have spent a lot of their time studying light and electrons, the key ingredients of digital photography. In so doing they have left us with a wealth of theories to explain their behavior in nature and in our equipment. In this article I will describe how to simulate the information generated by a uniformly illuminated imaging system using open source Octave (or equivalently Matlab) utilizing some of these theories.
Since as you will see the simulations are incredibly (to me) accurate, understanding how the simulator works goes a long way in explaining the inner workings of a digital sensor at its lowest levels; and simulated data can be used to further our understanding of photographic science without having to run down the shutter count of our favorite SLRs. This approach is usually referred to as Monte Carlo simulation.
Whether the human visual system perceives a displayed slow changing gradient of tones, such as a vast expanse of sky, as smooth or posterized depends mainly on two well known variables: the Weber-Fechner Fraction of the ‘steps’ in the reflected/produced light intensity (the subject of this article); and spatial dithering of the light intensity as a result of noise (the subject of a future one).
Continue reading Smooth Gradients and the Weber-Fechner Fraction
We’ve seen how information about a photographic scene is collected in the ISOless/invariant range of a digital camera sensor, amplified, converted to digital data and stored in a raw file. For a given Exposure the best information quality (IQ) about the scene is available right at the photosites, only possibly degrading from there – but a properly designed** fully ISO invariant imaging system is able to store it in its entirety in the raw data. It is able to do so because the information carrying capacity (photographers would call it the dynamic range) of each subsequent stage is equal to or larger than the previous one. Cameras that are considered to be (almost) ISOless from base ISO include the Nikon D7000, D7200 and the Pentax K5. All digital cameras become ISO invariant above a certain ISO, the exact value determined by design compromises.

In this article we’ll look at a class of imagers that are not able to store the whole information available at the photosites in one go in the raw file for a substantial portion of their working ISOs. The photographer can in such a case choose out of the full information available at the photosites what smaller subset of it to store in the raw data by the selection of different in-camera ISOs. Such cameras are sometimes improperly referred to as ISOful. Most Canon DSLRs fall into this category today. As do kings of darkness such as the Sony a7S or Nikon D5.
Continue reading Information Transfer: Non ISO-Invariant Case
In the last few posts I have made the case that Image Quality in a digital camera is entirely dependent on the light Information collected at a sensor’s photosites during Exposure. Any subsequent processing – whether analog amplification and conversion to digital in-camera and/or further processing in-computer – effectively applies a set of Information Transfer Functions to the signal that when multiplied together result in the data from which the final photograph is produced. Each step of the way can at best maintain the original Information Quality (IQ) but in most cases it will degrade it somewhat.
This point is key: in a well designed imaging system** the final image IQ is only as good as the scene information collected at the sensor’s photosites, independently of how this information is stored in the working data along the processing chain, on its way to being transformed into a pleasing photograph. As long as scene information is properly encoded by the system early on, before being written to the raw file – and information transfer is maintained in the data throughout the imaging and processing chain – final photograph IQ will be virtually the same independently of how its data’s histogram looks along the way.
Continue reading Image Quality: Raising ISO vs Pushing in Conversion
We know that the best Information Quality possible collected from the scene by a digital camera is available right at the output of the sensor and it will only be degraded from there. This article will discuss what happens to this information as it is transferred through the imaging system and stored in the raw data. It will use the simple language outlined in the last post to explain how and why the strategy for Capturing the best Information or Image Quality (IQ) possible from the scene in the raw data involves only two simple steps:
1) Maximizing the collected Signal given artistic and technical constraints; and
2) Choosing what part of the Signal to store in the raw data and what part to leave behind.
The second step is only necessary if your camera is incapable of storing the entire Signal at once (that is it is not ISO invariant) and will be discussed in a future article. In this post we will assume an ISOless imaging system.
Continue reading Information Transfer – The ISO Invariant Case
Ever since Einstein we’ve been able to say that humans ‘see’ because information about the scene is carried to the eyes by photons reflected by it. So when we talk about Information in photography we are referring to information about the energy and distribution of photons arriving from the scene. The more complete this information, the better we ‘see’. No photons = no information = no see; few photons = little information = see poorly = poor IQ; more photons = more information = see better = better IQ.
Sensors in digital cameras work similarly, their output ideally being the energy and location of every photon incident on them during Exposure. That’s the full information ideally required to recreate an exact image of the original scene for the human visual system, no more and no less. In practice however we lose some of this information along the way during sensing, so we need to settle for approximate location and energy – in the form of photoelectron counts by pixels of finite area, often correlated to a color filter array.
My camera has an engineering Dynamic Range of 14 stops, how many bits do I need to encode that DR? Well, to encode the whole Dynamic Range 1 bit could suffice, depending on the content and the application. The reason is simple, dynamic range is only concerned with the extremes, not with tones in between:
![\[ DR = \frac{Maximum Signal}{Minimum Signal} \]](https://i0.wp.com/www.strollswithmydog.com/wordpress/wp-content/ql-cache/quicklatex.com-f89166dae7cfbfc1a37b1ef0f536dd7e_l3.png?resize=194%2C41&ssl=1 "Rendered by QuickLaTeX.com")
So in theory we only need 1 bit to encode it: zero for minimum signal and one for maximum signal, like so
Dynamic Range (DR) in Photography usually refers to the linear working signal range, from darkest to brightest, that the imaging system is capable of capturing and/or displaying. It is expressed as a ratio, in stops:
![\[ DR = log_2(\frac{Maximum Acceptable Signal}{Minimum Acceptable Signal}) \]](https://i0.wp.com/www.strollswithmydog.com/wordpress/wp-content/ql-cache/quicklatex.com-c691db4feaf1e0b8c2cf50cb84b5b7bf_l3.png?resize=321%2C41&ssl=1 "Rendered by QuickLaTeX.com")
It is a key Image Quality metric because photography is all about contrast, and dynamic range limits the range of recordable/ displayable tones. Different components in the imaging system have different working dynamic ranges and the system DR is equal to the dynamic range of the weakest performer in the chain.
Imperfections in an imaging system’s capture process manifest themselves in the form of deviations from the expected signal. We call these imperfections ‘noise’ because they introduce grain and artifacts in our images. The fewer the imperfections, the lower the noise, the higher the image quality.
However, because the Human Visual System is adaptive within its working range, it’s not the absolute amount of noise that matters to perceived Image Quality (IQ) as much as the amount of noise relative to the signal – represented for instance by the Signal to Noise Ratio (SNR). That’s why to characterize the performance of a sensor in addition to signal and noise we also need to determine its sensitivity and the maximum signal it can detect.
In this series of articles I will describe how to use the Photon Transfer method and a spreadsheet to determine basic IQ performance metrics of a digital camera sensor. It is pretty easy if we keep in mind the simple model of how light information is converted into raw data by digital cameras:

Olympus just announced the E-M5 Mark II, an updated version of its popular micro Four Thirds E-M5 model, with an interesting new feature: its 16MegaPixel sensor, presumably similar to the one in other E-Mx bodies, has a high resolution mode where it gets shifted around by the image stabilization servos during exposure to capture, as they say in their press release
‘resolution that goes beyond full-frame DSLR cameras. 8 images are captured with 16-megapixel image information while moving the sensor by 0.5 pixel steps between each shot. The data from the 8 shots are then combined to produce a single, super-high resolution image, equivalent to the one captured with a 40-megapixel image sensor.’
A great idea that could give a welcome boost to the ‘sharpness’ of this handy system. Preliminary tests show that the E-M5 mk II 64MP High-Res mode gives some advantage in MTF50 linear spatial resolution compared to the Standard Shot 16MP mode with the captures in this post. Plus it apparently virtually eliminates the possibility of aliasing and moiré. Great stuff, Olympus.
Equivalence – as we’ve discussed one of the fairest ways to compare the performance of two cameras of different physical formats, characteristics and specifications – essentially boils down to two simple realizations for digital photographers:
The first realization should be intuitive (see next post). The second one is the subject of this post: I will deal with it through a couple of geometrical diagrams.
Continue reading Equivalence in Pictures: Focal Length, f-number, diffraction, DOF
Determining the Signal to Noise Ratio (SNR) curves of your digital camera at various ISOs and extracting from them the underlying IQ metrics of its sensor can help answer a number of questions useful to photography. For instance whether/when to raise ISO; what its dynamic range is; how noisy its output could be in various conditions; or how well it is likely to perform compared to other Digital Still Cameras. As it turns out obtaining the relative data is a little time consuming but not that hard. All you need is your camera, a suitable target, a neutral density filter, dcraw or libraw or similar software to access the linear raw data – and a spreadsheet.
Continue reading How to Measure the SNR Performance of Your Digital Camera
We’ve seen how SNR curves can help us analyze digital camera IQ:

In this post we will use them to help us compare digital cameras, independently of format size. Continue reading Comparing Sensor SNR
In photography the higher the ratio of Signal to Noise, the less grainy the final image normally looks. The Signal-to-Noise-ratio SNR is therefore a key component of Image Quality. Let’s take a closer look at it. Continue reading SNR Curves and IQ in Digital Cameras
Effective Quantum Efficiency as I calculate it is an estimate of the probability that a visible photon – from a ‘Daylight’ blackbody radiating source at a temperature of 5300K impinging on the sensor in question after making it through its IR filter, UV filter, AA low pass filter, microlenses, average Color Filter – will produce a photoelectron upon hitting silicon:
(1) 
with  the signal in photoelectrons and
the signal in photoelectrons and  the number of photons incident on the sensor at the given Exposure as shown below. Continue reading The Difference between Peak and Effective Quantum Efficiency
the number of photons incident on the sensor at the given Exposure as shown below. Continue reading The Difference between Peak and Effective Quantum Efficiency
One of the fairest ways to compare the performance of two cameras of different physical characteristics and specifications is to ask a simple question: which photograph would look better if the cameras were set up side by side, captured identical scene content and their output were then displayed and viewed at the same size?
Achieving this set up and answering the question is anything but intuitive because many of the variables involved, like depth of field and sensor size, are not those we are used to dealing with when taking photographs. In this post I would like to attack this problem by first estimating the output signal of different cameras when set up to capture Equivalent images.
It’s a bit long so I will give you the punch line first: digital cameras of the same generation set up equivalently will typically generate more or less the same signal in  independently of format. Ignoring noise, lenses and aspect ratio for a moment and assuming the same camera gain and number of pixels, they will produce identical raw files. Continue reading Equivalence and Equivalent Image Quality: Signal
independently of format. Ignoring noise, lenses and aspect ratio for a moment and assuming the same camera gain and number of pixels, they will produce identical raw files. Continue reading Equivalence and Equivalent Image Quality: Signal
Why Raw? The question is whether one is interested in measuring the objective, quantitative spatial resolution capabilities of the hardware or whether instead one would prefer to measure the arbitrary, qualitatively perceived sharpening prowess of (in-camera or in-computer) processing software as it turns the capture into a pleasing final image. Either is of course fine.
My take on this is that the better the IQ captured the better the final image will be after post processing. In other words I am typically more interested in measuring the spatial resolution information produced by the hardware comfortable in the knowledge that if I’ve got good quality data to start with its appearance will only be improved in post by the judicious use of software. By IQ here I mean objective, reproducible, measurable physical quantities representing the quality of the information captured by the hardware, ideally in scientific units.
Can we do that off a file rendered by a raw converter or, heaven forbid, a Jpeg? Not quite, especially if the objective is measuring IQ. Continue reading Why Raw Sharpness IQ Measurements Are Better
You want to measure how sharp your camera/lens combination is to make sure it lives up to its specs. Or perhaps you’d like to compare how well one lens captures spatial resolution compared to another you own. Or perhaps again you are in the market for new equipment and would like to know what could be expected from the shortlist. Or an old faithful is not looking right and you’d like to check it out. So you decide to do some testing. Where to start?
In the next four articles I will walk you through my methodology based on captures of slanted edge targets:
How many visible photons hit a pixel on my sensor? The answer depends on Exposure, Spectral power distribution of the arriving light and effective pixel area. With a few simplifying assumptions it is not difficult to calculate that with a typical Daylight illuminant the number is roughly 11,760 photons per lx-s per  . Without the simplifying assumptions* it reduces to about 11,000. Continue reading How Many Photons on a Pixel
. Without the simplifying assumptions* it reduces to about 11,000. Continue reading How Many Photons on a Pixel
I measured the Spectral Photon Distribution of the three CFA filters of a Nikon D610 in ‘Daylight’ conditions with a cheap spectrometer. Taking a cue from this post I pointed it at light from the sun reflected off a gray card and took a raw capture of the spectrum it produced.

An ImageJ plot did the rest. I took a dozen captures at slightly different angles to catch the picture of the clearest spectrum. Shown are the three spectral curves averaged over the two best opposing captures, each proportional to the number of photons let through by the respective Color Filter. The units on the vertical axis are raw black-subtracted values from the raw file (DN), therefore the units on the vertical axis are proportional to the number of incident photons in each case. The Photopic Eye Luminous Efficiency Function (2 degree, Sharpe et al 2005) is also shown for reference, scaled to the same maximum as the green curve (although in energy units, my bad). Continue reading Nikon CFA Spectral Power Distribution
Is MTF50 a good proxy for perceived sharpness? In this article and those that follow MTF50 indicates the spatial frequency at which the Modulation Transfer Function of an imaging system is half (50%) of what it would be if the system did not degrade detail in the image painted by incoming light.
It makes intuitive sense that the spatial frequencies that are most closely related to our perception of sharpness vary with the size and viewing distance of the displayed image.
For instance if an image captured by a Full Frame camera is viewed at ‘standard’ distance (that is a distance equal to its diagonal), it turns out that the portion of the MTF curve most representative of perceived sharpness appears to be around MTF90. On the other hand, when pixel peeping, the spatial frequencies around MTF50 look to be a decent, simple to calculate indicator of it with a current imaging system in good working conditions. Continue reading MTF50 and Perceived Sharpness